

北京大学喻俊志教授团队Science子刊《Science Advances》:多模态软体机器鱼揭示鱼类高速与高机动游动的内在机理
自然界中,鱼类通过调节身体参与波动的范围,演化出鳗鲡科、亚鲹科、鲹科及金枪鱼等多种游动模式。随着波动区域逐渐向尾部集中,其游动速度也相应提升。长期以来,一个核心科学问题尚未得到充分阐释:为何仅依靠尾部摆动的金枪鱼能够实现高频高速推进,而全身波动的鳗鲡科鱼类却受到限制?除形态与结构因素外,参与波动的身体长度(即肌肉招募比例)被认为是关键但长期被忽视的变量。由于生物肌电测量的侵入性限制,相关假说难以直接验证。仿生机器鱼为逆向研究鱼类游动机理提供了新途径,但现有平台大多局限于单一游动模态,难以在统一条件下进行公平比较。
针对这一挑战,喻俊志教授团队受鱼类分节肌肉结构启发,在国际顶级期刊《Science Advances》上发表了题为“Adaptive multi-mode swimming of a reconfigurable modular soft robotic fish”的研究论文。该研究开发了一种基于张拉整体结构与仿生变刚度肌肉的多模态机器鱼平台。其核心是团队自主研发的仿生变刚度肌肉,基于层状阻塞原理实现关节刚度的快速、大幅调节。通过对尾部关节刚度分布的协同控制,机器鱼可在同一平台上实现从高机动的“鳗鲡科模式”到高速冲刺的“金枪鱼模式”的自由切换,为系统揭示不同游动模式的生物力学机制提供了统一的实验平台。
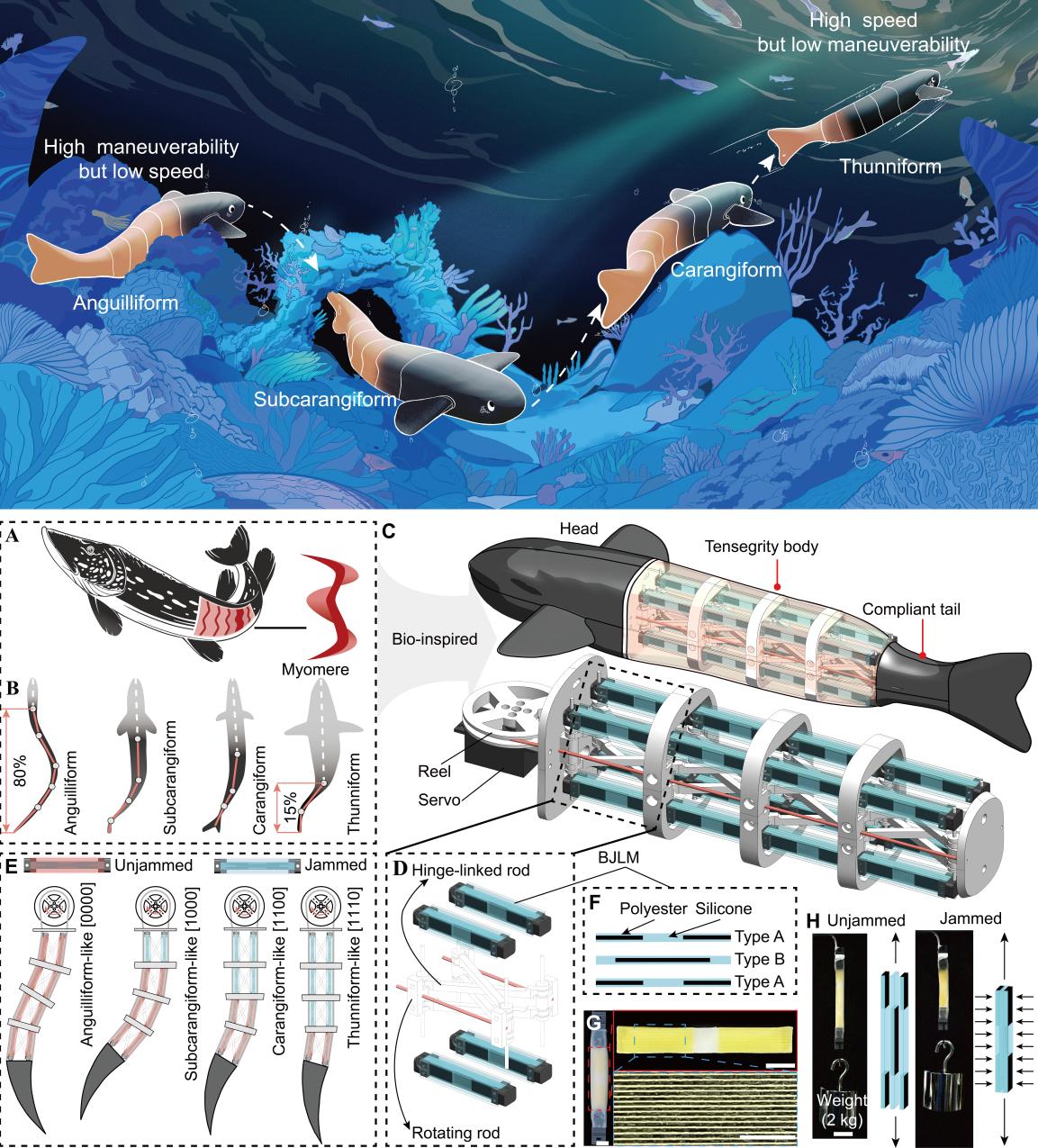
图1 仿生多模态机器鱼与仿生变刚度肌肉设计
机器鱼的游速随着锁定关节数量的增加而持续提高。金枪鱼模式在5 Hz时达到最大游速1.24倍体长/秒(BL/s),而鳗鲡科模式在4 Hz以上出现明显性能衰减。运动学分析表明,机器鱼游速由尾部振幅与鱼体波传播速度共同决定。鳗鲡科模式在高频下因刚度不足导致尾部振幅快速衰减;相比之下,金枪鱼模式依托高刚度躯干,在5 Hz下仍能维持较大尾部振幅,支持鱼体波的高效传播(波长约为0.75–1.05倍体长,与真实鱼类高度一致)。这表明,在高刚度支撑下,高频、大振幅与高波速的协同作用是金枪鱼模式实现高速巡航的关键。
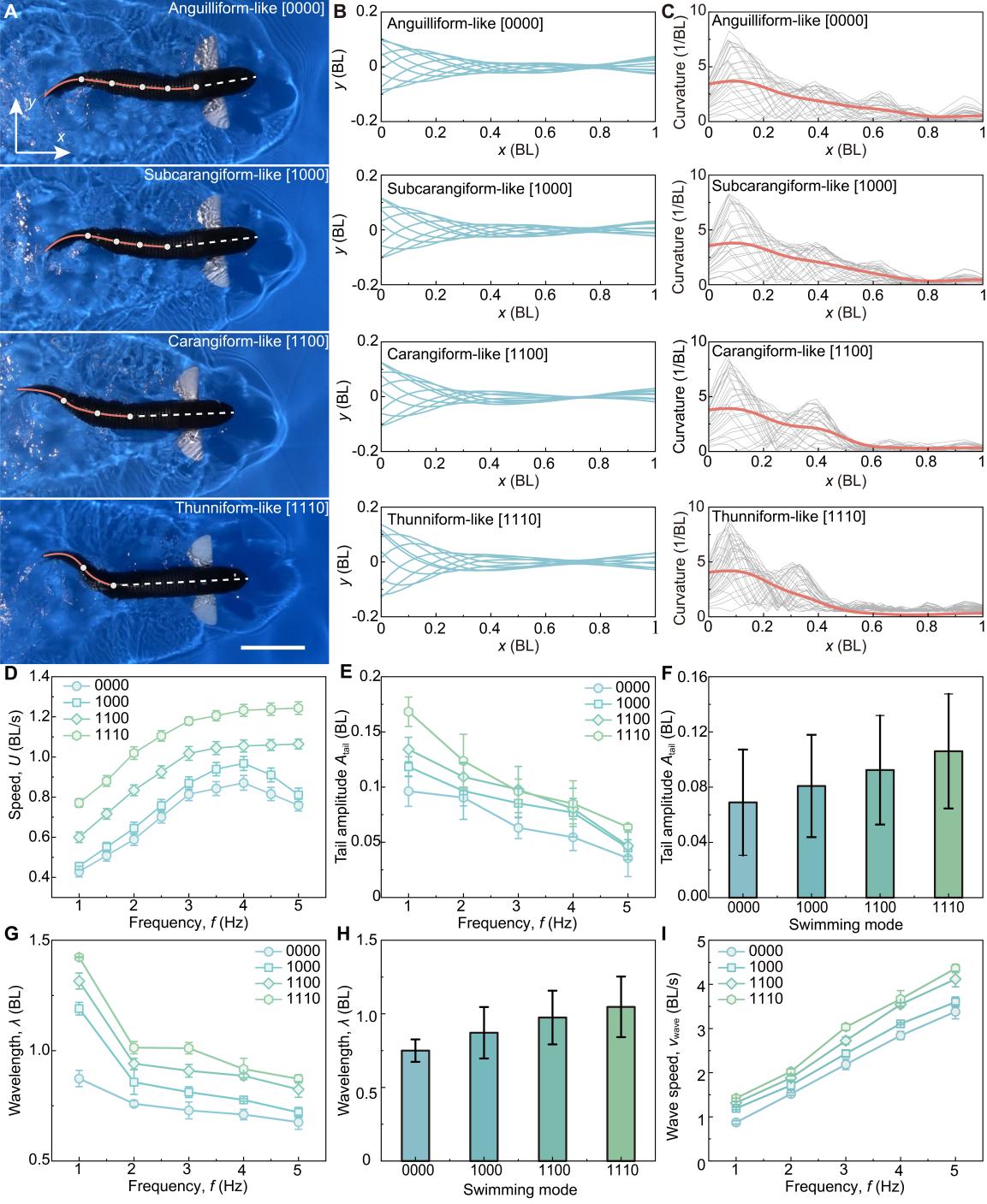
图2 多模态机器鱼的游动性能与运动学分析
计算流体动力学(CFD)数值仿真显示,鳗鲡科模式产生的尾涡破碎且无序,动量耗散较大,在头部与胸鳍附近出现明显高压阻力区,削弱了尾部推进效果。相比之下,金枪鱼模式的压力增强始终集中于尾部,形成强烈、规整的涡环,能够高效推动水体向后运动。定量结果表明,金枪鱼模式下的推力随频率单调上升,而鳗鲡科模式在4 Hz后明显衰减;在5 Hz工况下,前者推力较后者提升142%。效率分析进一步显示,鳗鲡科模式在低频下更节能,而金枪鱼模式在高频下更具优势。
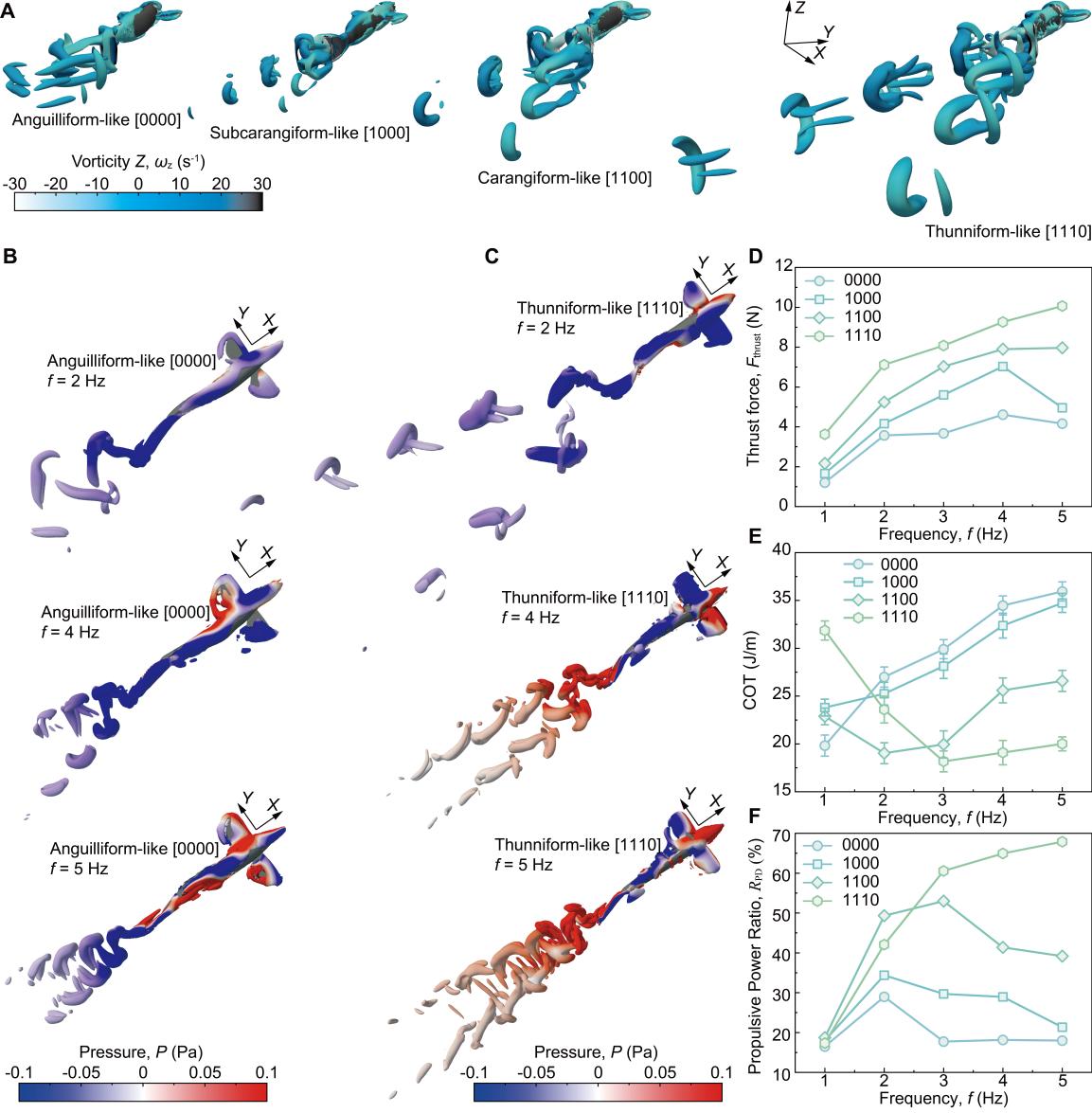
图3 多模态机器鱼游动的水动力分析
同时,该研究也揭示了快速性与机动性之间的经典权衡关系。游速最快的金枪鱼模式转弯半径最大,而鳗鲡科模式凭借全身大幅度弯曲展现出最优的灵活性,其最小转弯半径仅为0.26 BL。其根本原因在于鳗鲡科模式单次摆动可产生约54.3°的身体转角,侧向力约为金枪鱼模式的3倍;而高刚度的金枪鱼模式受结构限制,单次转角仅为21.4°。该结果说明,采用单一游动模式的机器人往往难以兼顾快速性与灵活性。
本研究通过变模态控制策略成功突破了这一固有权衡。机器鱼可利用金枪鱼模式实现高速冲刺,也可迅速切换至鳗鲡科模式完成灵巧转向。在极限U型狭窄通道测试中,机器鱼采用“金枪鱼模式高速接近—鳗鲡科模式转弯—金枪鱼模式加速”的多模态策略顺利通过。相比之下,单一模态机器人则易出现卡滞或效率严重下降。野外实验进一步验证,多模态切换能力是水下机器人在开阔水域与复杂狭缝环境中实现高效敏捷通行的关键。这一突破不仅可为复杂水域环境下的生态监测、资源勘探及灾难搜救作业提供平台支撑,而且为研发兼具长续航和高机动性的新一代水下智能装备开辟了全新的仿生路径。
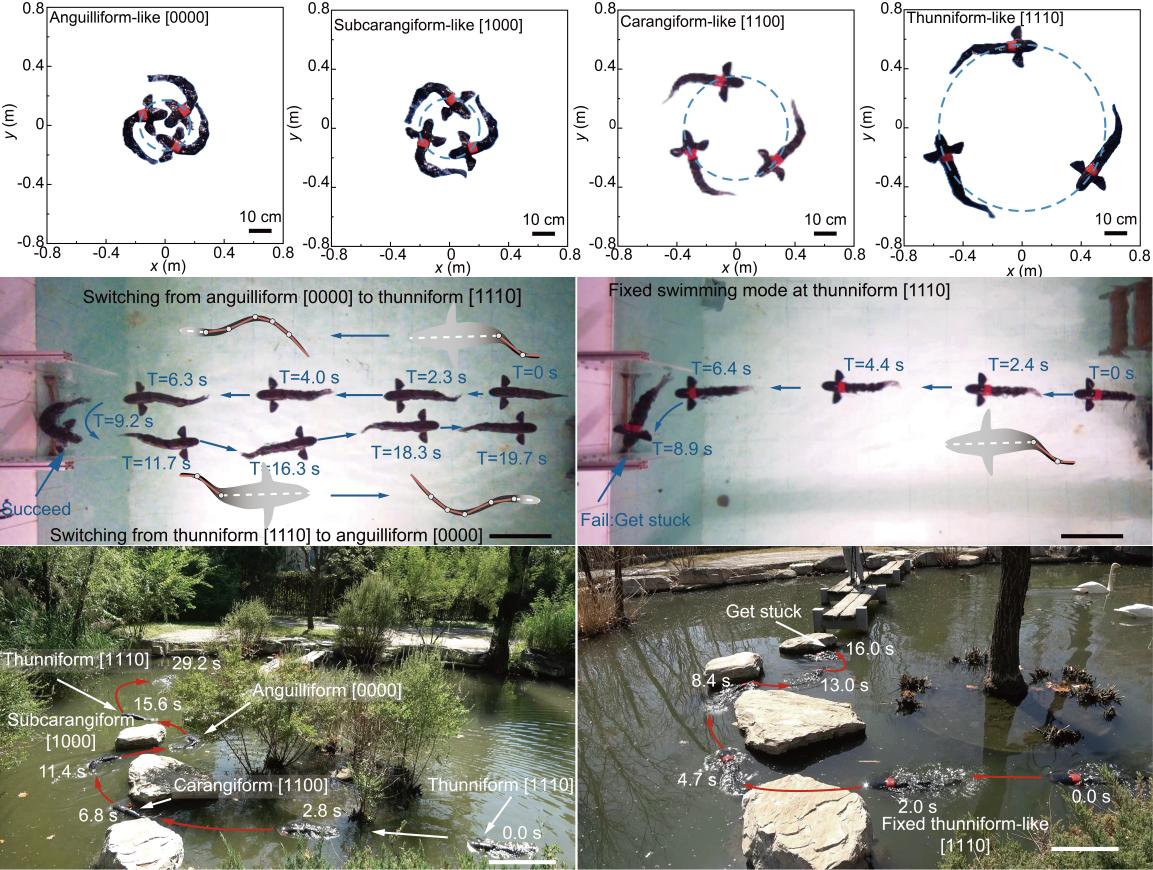
图4 多模态机器鱼的转向与在线多模态游动
该论文的第一作者为北京大学先进制造与机器人学院博士研究生王博和博士后李磊。北京大学先进制造与机器人学院喻俊志教授为唯一通讯作者。合作者包括中国科学院力学研究所徐梦凡博士后、银波副研究员,大连理工大学张捷助理研究员,北京大学工学院本科生胡楠楠,北京大学先进制造与机器人学院硕士研究生高文卓和博士研究生莘展骅。
相关研究得到了国家自然科学基金、北京市科技新星计划、河北省自然科学基金、国家资助博士后研究人员计划及中国博士后科学基金等的联合资助。